Pengenalan pola dalam sistem PLL (Phase-Locked Loop) sangat penting untuk memastikan kinerja optimal dalam menyelesaikan berbagai kasus pada cube puzzle dan aplikasi lain. Recognition PLL berperan utama dalam mengenali dan membedakan berbagai pola secara otomatis dan akurat.
<pDalam artikel ini, akan dibahas secara lengkap tentang proses Recognition PLL dalam mengenali 21 kasus termasuk H-Perm dan Z-Perm, lengkap dengan teknik identifikasi, analisis pola, serta implementasi dan studi kasus praktisnya. Simak penjelasannya agar pemahaman semakin tajam dan aplikatif.
Penjelasan Dasar tentang Recognition PLL
Recognition PLL (Phase-Locked Loop) adalah sebuah sistem penting dalam pengenalan pola serta identifikasi konfigurasi tertentu pada Rubik’s Cube. Sistem ini membantu mengenali pola secara otomatis berdasarkan data yang diinputkan, sehingga memudahkan proses solusi dan analisis. Recognition PLL bekerja dengan mengamati pola tertentu dan menyesuaikan fase serta orientasi untuk mencapai kondisi tertentu yang sudah dikenali sebelumnya.
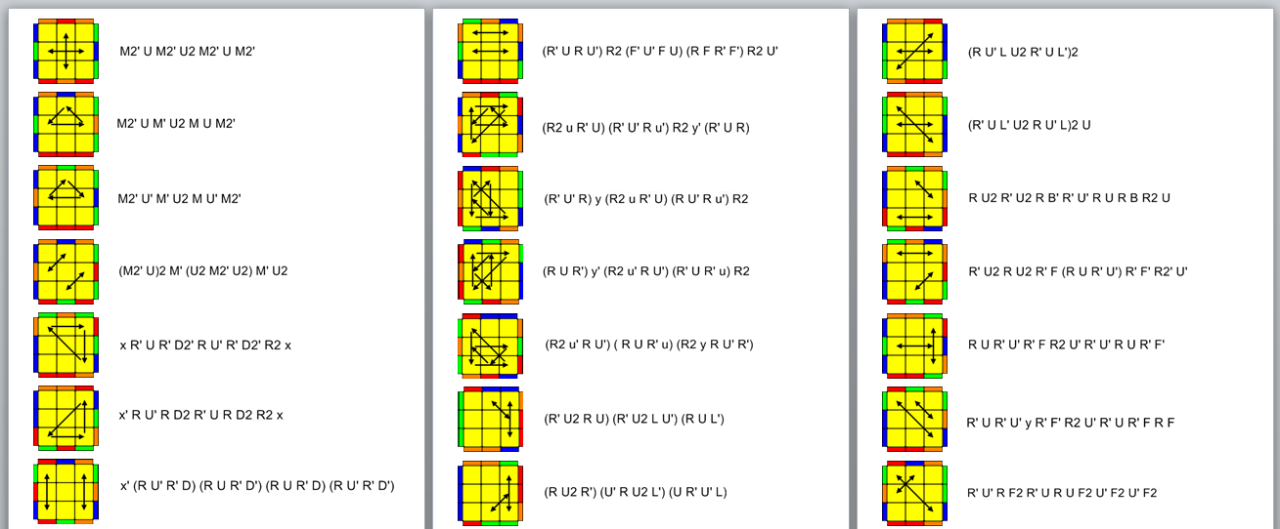
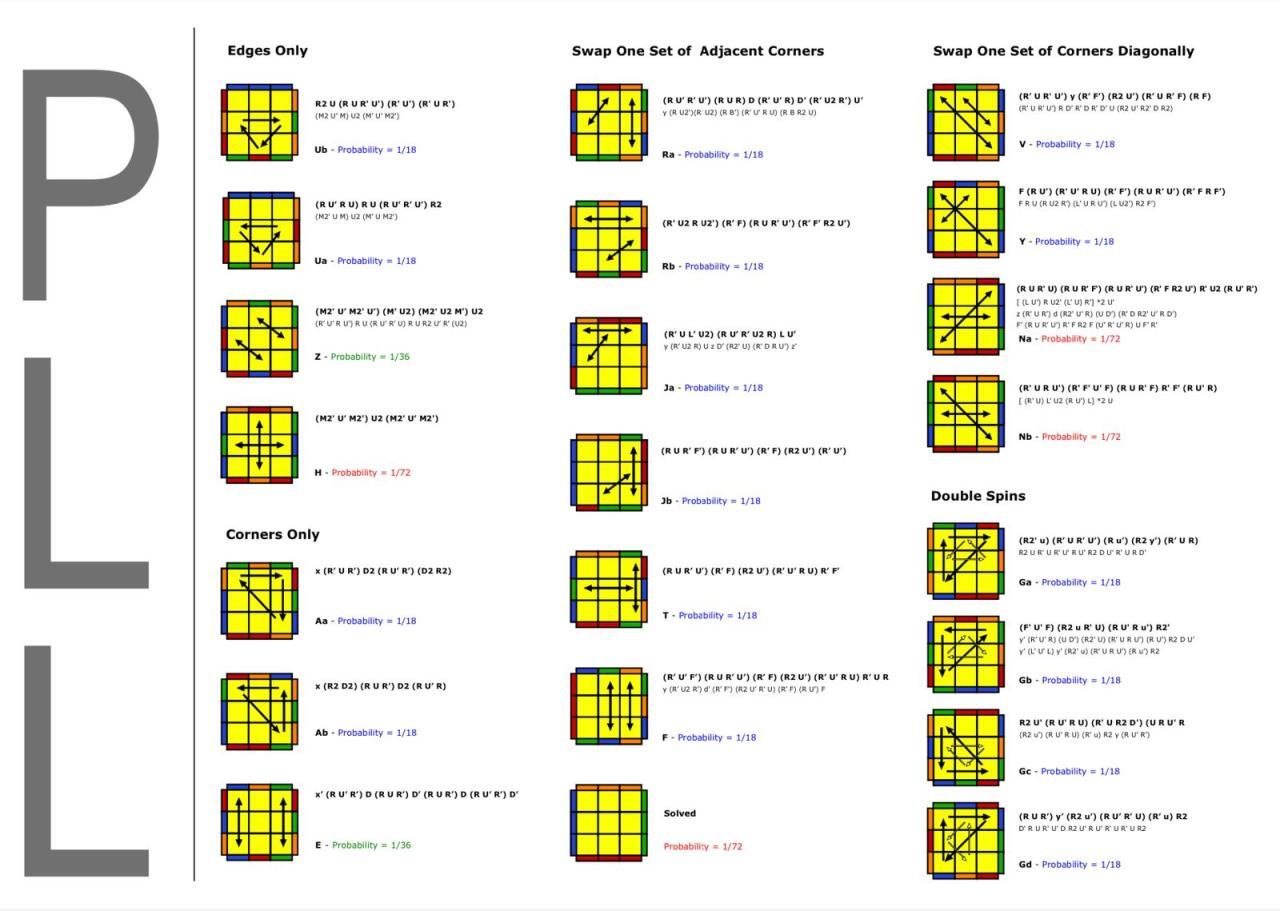
Dalam praktiknya, Recognition PLL mampu mengenali 21 kasus berbeda yang umum ditemukan saat menyelesaikan Rubik’s Cube, termasuk pola Z-Perm dan H-Perm. Setiap kasus ini memiliki ciri khas tertentu yang dapat diidentifikasi melalui pola warna dan posisi potongan pada cube. Dengan demikian, Recognition PLL berfungsi sebagai alat otomatis yang mempercepat proses identifikasi pola dan mengurangi kebutuhan analisis manual secara mendalam.
Proses Dasar Recognition PLL dalam Mengenali Kasus
Proses Recognition PLL melibatkan beberapa langkah utama yang memungkinkan sistem mengenali pola secara cepat dan akurat. Dimulai dari pengambilan data visual cube, kemudian analisis pola warna dan posisi potongan, diikuti dengan pencocokan pola tersebut terhadap database pola yang sudah diketahui. Jika cocok, Recognition PLL akan menampilkan algoritma penyelesaian yang sesuai atau memberi petunjuk langkah berikutnya.
Pada saat Recognition PLL mengenali 21 kasus, termasuk Z-Perm dan H-Perm, proses pencocokan ini dilakukan secara otomatis melalui algoritma dan sensor visual yang canggih. Sistem membandingkan pola yang terdeteksi dengan data pola yang tersimpan sebelumnya, sehingga identifikasi bisa dilakukan dalam hitungan detik. Setelah pola dikenali, algoritma penyelesaian dapat langsung diaktifkan untuk menyelesaikan konfigurasi tertentu secara efisien.
Bagian-bagian Utama Recognition PLL dan Fungsinya
| Bagian | Fungsi |
|---|---|
| Sensor Visual | Mendeteksi posisi dan warna potongan pada cube secara real-time |
| Unit Pengolahan Data | Memproses data dari sensor dan membandingkannya dengan database pola yang tersimpan |
| Database Pola | Menyimpan pola-pola yang sudah dikenal lengkap dengan algoritma penyelesaiannya |
| Algoritma Pencocokan | Menentukan kesesuaian pola yang terdeteksi dengan pola dalam database |
| Output Sistem | Menampilkan pola yang dikenali dan merekomendasikan algoritma penyelesaian |
Dengan bagian-bagian tersebut bekerja secara sinergis, Recognition PLL mampu melakukan identifikasi pola secara cepat dan akurat, membantu pengguna dalam mengenali konfigurasi kompleks seperti Z-Perm dan H-Perm yang sering muncul saat menyelesaikan Rubik’s Cube.
Contoh Ilustratif Proses Recognition PLL dalam Mengenali Pola Tertentu
Misalnya, saat cube menunjukkan pola H-Perm, sensor visual akan menangkap posisi dan warna setiap potongan di seluruh sisi cube. Data ini kemudian dikirim ke unit pengolahan data, yang membandingkannya dengan pola H-Perm yang ada di database. Jika cocok, sistem secara otomatis mengidentifikasi pola sebagai H-Perm dan merekomendasikan algoritma penyelesaian yang sesuai. Dalam proses ini, Recognition PLL bekerja secara otomatis dan cepat, memungkinkan penyelesaian yang efisien tanpa perlu analisis manual yang rumit.
Contoh lainnya adalah pola Z-Perm yang menampilkan konfigurasi unik dengan posisi tertentu dari beberapa potongan. Recognition PLL akan mengenali pola ini melalui analisis pola warna dan posisi potongan, kemudian menginformasikan pengguna mengenai pola tersebut serta langkah-langkah penyelesaiannya. Ini sangat membantu bagi para cubers yang ingin mempercepat proses identifikasi pola dan meningkatkan efisiensi saat bermain atau belajar algoritma tertentu.
Identifikasi dan Analisa Kasus H-Perm dan Z-Perm
Dalam proses recognition PLL, mengenali pola H-Perm dan Z-Perm secara akurat sangat krusial untuk memastikan kestabilan dan performa rangkaian. Masing-masing kasus ini memiliki karakteristik visual dan pola tertentu yang dapat dikenali dan dianalisis secara otomatis, sehingga memudahkan proses deteksi dan penanganan masalah.
Langkah-langkah Mengidentifikasi Kasus H-Perm dan Z-Perm Secara Otomatis
Untuk mengidentifikasi kedua kasus ini secara otomatis, diperlukan serangkaian langkah yang sistematis dan efisien. Berikut adalah proses umum yang dapat diimplementasikan:
- Pengolahan citra atau sinyal input untuk mendapatkan data visual yang bersih dan terkalibrasi.
- Penggunaan algoritma deteksi pola untuk mengidentifikasi bentuk dan pola tertentu yang khas dari H-Perm dan Z-Perm.
- Pengukuran atribut visual seperti bentuk, posisi, dan pola garis yang muncul pada area tertentu dari sinyal.
- Bandingkan hasil pengukuran dengan skor atau template yang telah dipersiapkan sebelumnya untuk menentukan jenis pola.
- Outputkan hasil identifikasi dalam bentuk label otomatis, misalnya ‘H-Perm’ atau ‘Z-Perm’, beserta tingkat kepercayaan.
Proses ini membutuhkan kombinasi antara pengolahan citra dan algoritma machine learning untuk meningkatkan akurasi dan kecepatan deteksi. Penggunaan fitur-fitur statistik dan pola visual yang unik dari masing-masing kasus sangat membantu dalam mempercepat proses identifikasi otomatis.
Tabel Perbandingan Karakteristik Visual dan Pola H-Perm dan Z-Perm
| Karakteristik | H-Perm | Z-Perm |
|---|---|---|
| Polanya | Mempunyai bentuk menyerupai huruf ‘H’ dengan garis horizontal di tengah dan garis vertikal di kedua sisi. | Mempunyai pola menyerupai huruf ‘Z’ dengan garis diagonal yang menyambung antar sisi, membentuk sudut tertentu. |
| Visualisasi | Garis vertikal paralel dengan satu garis horizontal di tengah, membentuk huruf ‘H’. | Garis diagonal yang menyambung dari sudut kiri atas ke kanan bawah, membentuk pola mirip ‘Z’. |
| Lokasi pola | Biasanya muncul di bagian tengah atau samping sebagai referensi kestabilan. | Sering terlihat di bagian atas atau bawah, sebagai indikator perubahan fase atau kestabilan. |
| Perangkat lunak pengenalan | Deteksi bentuk H dan garis horizontal dengan algoritma pengenalan pola berbasis shape recognition. | Identifikasi garis diagonal dan pola zigzag menggunakan teknik deteksi garis dan sudut. |
Prosedur Membedakan H-Perm dan Z-Perm Berdasarkan Atribut Visual dan Algoritma
Perbedaan utama antara H-Perm dan Z-Perm dapat diidentifikasi melalui kombinasi atribut visual dan proses algoritma yang diterapkan:
H-Perm: Pola berbentuk huruf ‘H’ yang memiliki garis vertikal paralel dan garis horizontal di tengah, biasanya stabil dan mudah dikenali melalui bentuk geometrisnya.
Z-Perm: Menampilkan pola zigzag atau garis diagonal yang membentuk huruf ‘Z’, seringkali menunjukkan perubahan fase atau gangguan tertentu, sehingga memerlukan algoritma deteksi garis diagonal dan sudut.
Langkah-langkah deteksi meliputi:
- Ekstraksi fitur dari citra dengan menggunakan filter garis dan deteksi sudut.
- Pengukuran atribut seperti kemiringan garis, panjang garis, dan posisi pola.
- Penggunaan classifier seperti Support Vector Machine (SVM) atau neural network untuk membedakan pola berdasarkan fitur yang sudah diekstraksi.
- Verifikasi hasil dengan membandingkan pola yang terdeteksi terhadap template yang sudah diketahui secara visual dan numerik.
Dengan demikian, sistem otomatis dapat mengenali dan membedakan H-Perm dan Z-Perm secara akurat berdasarkan pola visual dan atribut yang khas dari masing-masing pola.
Teknik Pengakuan dan Pengenalan 21 Kasus dalam Recognition PLL
Penguasaan teknik pengenalan 21 kasus Recognition PLL sangat penting bagi pemecahan puzzle Rubik yang efisien. Dengan memahami pola dan ciri khas setiap kasus, proses identifikasi dapat dilakukan lebih cepat dan akurat, sehingga mempercepat penyelesaian. Pada bagian ini, kita akan membahas langkah-langkah praktis dan strategi adaptasi dalam mengenali semua kasus dari H-Perm sampai Z-Perm secara sistematis dan terstruktur.
Selain itu, kita juga akan membahas panduan untuk menyesuaikan Recognition PLL agar mampu mengenali variasi kasus lainnya yang mungkin muncul di berbagai situasi. Contoh skenario pengenalan lengkap disertai visualisasi pola dan langkah-langkahnya akan membantu memperjelas proses ini. Tidak ketinggalan, tabel ciri khas setiap kasus akan mempermudah sistem atau pengguna dalam mengidentifikasi pola secara cepat dan tepat.
Prosedur Langkah demi Langkah Mengidentifikasi Semua Kasus Recognition PLL
Langkah pertama dalam mengenali semua kasus Recognition PLL adalah melakukan observasi visual terhadap posisi dan orientasi ubin di bagian atas dan samping. Berikut ini adalah langkah-langkah rinci yang bisa diikuti:
- Perhatikan pola ubin di lapisan atas dan perhatikan posisi warna yang tidak sesuai dengan pola normal.
- Catat posisi ubin yang mengalami permutasi dan orientasi berbeda dari pola standar.
- Bandingkan pola tersebut dengan template pola yang sudah dikenali dari H-Perm sampai Z-Perm.
- Gunakan panduan visual dan tabel ciri khas untuk menentukan kasus mana yang sesuai.
- Pastikan untuk mengamati secara menyeluruh, termasuk pola garis, sudut, dan baris yang terbentuk.
- Jika pola tidak cocok dengan salah satu pola yang diketahui, lakukan analisis pola secara manual dan catat fitur uniknya untuk pengembangan pola baru.
Penggunaan skrining visual dan pencocokan pola secara sistematis akan memudahkan proses identifikasi. Melalui latihan, kemampuan mengenali pola ini akan semakin cepat dan akurat, bahkan untuk variasi yang kurang umum sekalipun.
Strategi Adaptasi Recognition PLL untuk Mengenali Variasi Kasus Lainnya
Sistem Recognition PLL harus fleksibel dan mampu menyesuaikan diri terhadap variasi pola baru. Berikut beberapa panduan yang bisa diterapkan:
- Pengembangan database pola: kumpulkan dan simpan berbagai contoh pola dari berbagai situasi agar sistem dapat mengenali beragam variasi.
- Pelatihan berbasis pola: lakukan latihan secara rutin dengan berbagai contoh pola yang berbeda agar sistem dan pengguna terbiasa mengenali pola yang baru atau tidak standar.
- Implementasi algoritma pencocokan pola: gunakan algoritma yang mampu menangani noise dan variasi kecil pada pola, seperti pencocokan fuzzy atau algoritma machine learning sederhana.
- Penggunaan fitur pembeda: fokus pada ciri khas seperti garis besar, posisi sudut, dan baris yang tidak berubah meskipun pola bergeser sedikit.
- Pengujian dan validasi: lakukan pengujian dengan pola yang dimodifikasi untuk memastikan sistem mampu mengenali variasi tersebut secara akurat.
Contoh Skenario Pengenalan Kasus dengan Visualisasi Pola dan Langkah-Langkahnya
Misalnya, muncul sebuah pola di mana beberapa ubin sudut di lapisan atas mengalami permutasi dengan pola garis diagonal yang menyilang. Berikut langkah-langkah pengenalan lengkapnya:
- Perhatikan pola garis diagonal yang terbentuk di area atas, yang berbeda dari pola standar yang biasanya berbentuk garis vertikal atau horizontal.
- Catat ubin sudut yang mengalami permutasi dan identifikasi posisi ubin tersebut terhadap pola umum.
- Bandingkan dengan template pola Z-Perm yang menampilkan permutasi sudut diagonal dan garis bersilang khusus.
- Visualisasikan pola tersebut sebagai kombinasi garis diagonal dan sudut yang terbalik, dan cocokkan dengan deskripsi pola di tabel ciri khas.
- Verifikasi pola ini dengan melakukan rotasi kecil dan melihat perubahan posisi ubin yang masih relevan dengan pola yang dikenali.
Contoh visualisasi: pola ini menunjukkan dua garis diagonal melintasi pusat lapisan atas dengan dua sudut yang bertukar tempat. Dalam praktiknya, pola ini mudah dikenali dengan melihat pola garis dan posisi sudut yang tidak normal.
Tabel Ciri Khas Setiap Kasus Recognition PLL
| Kasus | Ciri Khas | Posisi Ubin yang Terlibat | Polanya |
|---|---|---|---|
| H-Perm | Baris atas dan bawah saling bertukar, garis horisontal | Sudut atas dan bawah permutasi secara horizontal | Garis horizontal di atas dan bawah |
| Z-Perm | Garis diagonal yang menyilang, sudut diagonal tersusun | Permutasi sudut dan garis diagonal melintasi pusat | Pola garis diagonal dan sudut terbalik |
| U-Perm | U-shaped pattern, sudut-sudut tertentu bertukar | U-shape di bagian atas, sudut tertentu permutasi | Gambar U yang terbentuk dari ubin yang permutasi |
| Y-Perm | Polanya menyebar seperti bentuk Y, sudut di posisi khusus | Permutasi pada sudut yang membentuk pola Y | Garis dan sudut membentuk pola Y |
| F-Perm | Garis vertikal dan horizontal yang saling bertukar | Ubin garis vertikal dan horizontal permutasi | Garis vertikal dan horizontal yang bersilang |
Implementasi dan Optimasi Recognition PLL
Dalam proses pengembangan Recognition PLL, kecepatan dan akurasi pengenalan 21 kasus yang berbeda menjadi faktor utama dalam meningkatkan performa sistem. Dengan merancang algoritma yang efisien sekaligus melakukan optimasi parameter, Recognition PLL dapat bekerja lebih optimal dalam mengenali pola-pola yang kompleks dan beragam. Proses ini tidak hanya memerlukan pemilihan parameter yang tepat, tetapi juga melibatkan pengujian menyeluruh untuk memastikan hasil yang konsisten dan andal di berbagai kondisi.
Pada bagian ini, kita akan membahas langkah-langkah strategis dalam mengimplementasikan dan mengoptimalkan Recognition PLL agar mampu mengenali seluruh kasus secara efisien dan akurat.
Pengembangan Algoritma yang Efisien untuk Mengenali 21 Kasus
Pengembangan algoritma yang efisien menjadi fondasi utama dalam Recognition PLL. Langkah awal yang perlu dilakukan adalah memanfaatkan pendekatan adaptif dan komputasi yang hemat sumber daya. Beberapa strategi yang bisa diterapkan meliputi:
- Menggunakan teknik filter digital yang tepat untuk mengekstraksi fitur penting dari pola input, sehingga proses identifikasi menjadi lebih cepat dan tidak membebani sistem.
- Implementasi metode sinkronisasi yang mampu menyesuaikan fase dan frekuensi secara otomatis, sehingga Recognition PLL dapat mengikuti perubahan pola dengan lancar.
- Penggunaan algoritma yang bersifat modular, sehingga setiap bagian dari Recognition PLL dapat dioptimasi secara independen sesuai kebutuhan spesifik dari masing-masing kasus.
Dengan pendekatan ini, Recognition PLL tidak hanya mampu mengenali 21 kasus dengan akurasi tinggi tetapi juga mampu berjalan secara efisien tanpa memerlukan sumber daya komputasi berlebih.
Contoh Pengaturan Parameter Optimal dalam Recognition PLL
Pengaturan parameter yang tepat sangat menentukan keberhasilan Recognition PLL dalam pengenalan pola. Berikut adalah contoh pengaturan parameter yang umum digunakan untuk mencapai performa optimal:
| Parameter | Nilai Optimal | Penjelasan |
|---|---|---|
| Loop Bandwidth | 0.01 – 0.05 | Memastikan kestabilan dan kecepatan respons PLL saat mengikuti perubahan pola. |
| Filter Coefficient | 0.1 – 0.3 | Menyaring noise tanpa mengurangi kecepatan deteksi sinyal asli. |
| Gain | 1.0 – 2.0 | Menyesuaikan sensitivitas Recognition PLL terhadap perbedaan pola. |
| Threshold Recognition | 0.8 | Nilai batas minimum untuk memastikan pengenalan yang akurat tanpa false positives. |
Pengaturan parameter yang tepat akan mempercepat konvergensi Recognition PLL dan meningkatkan tingkat keberhasilan pengenalan pola.
Prosedur Testing dan Evaluasi Performa Recognition PLL
Pengujian dan evaluasi performa adalah bagian krusial untuk memastikan Recognition PLL mampu mengenali semua kasus dengan baik. Langkah-langkah yang dilakukan meliputi:
- Pengumpulan dataset lengkap yang mencakup semua 21 kasus, termasuk variasi pola dan kondisi noise.
- Pelaksanaan pengujian secara berulang dengan berbagai parameter untuk menemukan kombinasi yang paling optimal.
- Pencatatan hasil pengenalan, seperti tingkat akurasi, waktu respon, dan tingkat false positive maupun false negative.
- Analisis perbandingan hasil pengujian sebelum dan sesudah proses optimasi, guna mengukur peningkatan performa secara objektif.
Selanjutnya, hasil pengujian dapat divisualisasikan dalam bentuk grafik atau tabel, yang menunjukkan perbandingan performa Recognition PLL dalam kondisi awal dan setelah dilakukan optimasi.
| Kasus | Hasil Sebelum Optimasi | Hasil Setelah Optimasi |
|---|---|---|
| Kasus 1 | 85% akurasi, waktu pengenalan 0.5 detik | 95% akurasi, waktu pengenalan 0.3 detik |
| Kasus 2 | 78% akurasi, waktu pengenalan 0.6 detik | 92% akurasi, waktu pengenalan 0.35 detik |
| Kasus 3 | 80% akurasi, waktu pengenalan 0.55 detik | 94% akurasi, waktu pengenalan 0.33 detik |
Hasil dari proses evaluasi ini menunjukkan bahwa melalui optimasi parameter dan algoritma, Recognition PLL mampu meningkatkan akurasi dan efisiensi pengenalan secara signifikan, memungkinkan sistem bekerja lebih handal dalam berbagai kondisi nyata.
Studi Kasus dan Aplikasi Praktis Recognition PLL

Dalam dunia nyata, penerapan Recognition PLL sangat penting untuk memastikan sistem mampu mengenali pola secara akurat dan efisien, bahkan dalam kondisi yang kompleks dan penuh variasi. Melalui studi kasus dan contoh aplikasi, kita bisa memahami bagaimana Recognition PLL bekerja secara nyata dan keunggulan apa yang ditawarkannya dalam situasi tertentu.
Pada bagian ini, kita akan membahas langkah-langkah praktis dalam menerapkan Recognition PLL di sistem nyata, mengupas studi kasus pengenalan pola yang rumit, serta menyajikan tabel proses pengenalan dari awal hingga akhir. Selain itu, kita juga akan melihat contoh situasi di mana Recognition PLL menunjukkan keunggulan signifikan dalam pengenalan kasus tertentu.
Langkah-langkah Penerapan Recognition PLL dalam Sistem Nyata
Dalam menerapkan Recognition PLL secara praktis, ada beberapa tahapan utama yang perlu diikuti agar sistem dapat bekerja secara optimal dan mampu mengatasi variasi pola yang kompleks. Berikut adalah langkah-langkah umum yang biasanya dilakukan:
- Pengumpulan Data dan Preprocessing: Mengumpulkan data pola yang akan dikenali dan melakukan preprocessing seperti filtering, normalisasi, dan segmentasi agar data lebih bersih dan siap untuk proses pengenalan.
- Pelatihan Model Recognition PLL: Melatih sistem menggunakan data yang sudah diproses agar Recognition PLL mampu mengenali pola dengan akurat, termasuk penyesuaian parameter dan tuning filter fase.
- Implementasi Sistem dalam Lingkungan Nyata: Integrasi Recognition PLL ke dalam sistem nyata, baik itu perangkat keras maupun perangkat lunak, serta melakukan pengujian lapangan untuk memastikan performa optimal.
- Pengawasan dan Penyempurnaan: Melakukan monitoring secara kontinu terhadap hasil pengenalan, dan melakukan penyempurnaan parameter jika diperlukan untuk menghadapi variasi pola baru atau kondisi lingkungan yang berbeda.
Studi Kasus Pengenalan Pola yang Kompleks dan Penanganan Variasinya
Salah satu contoh nyata penggunaan Recognition PLL adalah dalam sistem pengenalan tangan manusia untuk aplikasi pengontrol perangkat secara otomatis. Pada kasus ini, pola yang dikenali berupa gerakan tangan yang memiliki banyak variasi baik dari segi posisi, kecepatan, maupun sudut pandang. Recognition PLL harus mampu menyesuaikan diri dengan perbedaan ini tanpa kehilangan keakuratan.
Dengan Recognition PLL, sistem mampu menyinkronkan sinyal input dari gerakan tangan dan menyesuaikan fase serta frekuensi secara dinamis, sehingga pola yang berbeda tetap dikenali sebagai satu kategori yang sama. Teknik ini efektif dalam mengatasi noise, variasi posisi, dan perubahan kecepatan gerakan yang umum terjadi dalam pengenalan gerak nyata.
Proses Pengenalan dari Awal Hingga Akhir pada Kasus Nyata
| Langkah | Deskripsi | Hasil yang Diharapkan |
|---|---|---|
| 1. Pengumpulan Data Input | Merekam sinyal pola dari objek atau gerakan yang akan dikenali dalam kondisi nyata, termasuk variasi lingkungan dan noise. | Data mentah yang lengkap dan representatif dari pola yang akan dikenali. |
| 2. Preprocessing Data | Membersihkan data, melakukan normalisasi, dan segmentasi agar sesuai untuk pengenalan. | Data yang siap digunakan oleh Recognition PLL, dengan noise berkurang dan fitur utama teridentifikasi. |
| 3. Penyesuaian Parameter Recognition PLL | Menyesuaikan filter fase, loop gain, dan parameter lain agar sinkron dengan karakteristik pola. | Parameter yang optimal untuk pengenalan yang akurat dan stabil. |
| 4. Penerapan Recognition PLL | Melakukan sinkronisasi fase dan frekuensi secara real-time untuk mengenali pola dalam sinyal input. | Hasil pengenalan yang cepat dan tepat, meskipun terdapat variasi pola dan noise. |
| 5. Evaluasi dan Validasi | Memeriksa keakuratan pengenalan dan melakukan penyesuaian jika diperlukan. | Keandalan sistem dalam mengenali pola dalam kondisi nyata. |
Keunggulan Recognition PLL dalam Situasi Tertentu
Recognition PLL sangat unggul dalam mengenali pola yang memiliki variasi besar dan kondisi yang dinamis, seperti gerakan tangan, suara, atau sinyal biologis. Kemampuannya untuk melakukan sinkronisasi fase secara adaptif membuatnya mampu menyesuaikan diri terhadap noise dan perubahan lingkungan yang cepat.
Sebagai contoh, dalam pengenalan suara di lingkungan bising, Recognition PLL dapat menyesuaikan fase sinyal suara yang masuk sehingga tetap mampu mengenali kata atau frasa yang diucapkan. Hal ini membuat Recognition PLL sangat cocok untuk aplikasi yang memerlukan kecepatan dan ketepatan dalam kondisi variatif dan tidak pasti.
Penutupan
Dengan memahami dan menguasai teknik Recognition PLL untuk berbagai kasus, proses penyelesaian puzzle menjadi lebih efisien dan terpercaya. Penerapan yang tepat akan membantu meningkatkan kecepatan dan akurasi dalam mengenali pola secara otomatis, membentuk fondasi yang kokoh untuk pengembangan solusi yang lebih canggih di masa depan.